What is it?
Rugged is a geolocation library used for satellite imagery. It allows to map image coordinates (pixel, line) with geographic or projected coordinates (lon, lat or x, y, h) by computing the intersection of the sensor's lines of sight with the Earth's terrain. This mapping is essential for georeferencing raw satellite images. It is a key component when projecting an image on ground.
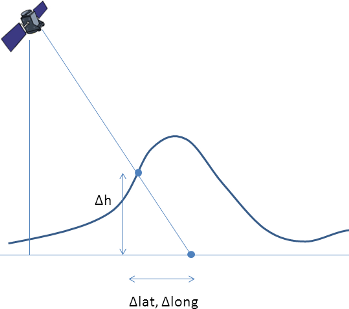
Effects of taking into account the DEM in the computation of latitude, longitude and altitude
Free (open source) software
Rugged is freely available both in source and binary formats, with all related documentation and tests.
Rugged is distributed under the Apache License version 2.0, a well known business-friendly license. This means anybody can use it to build any application, free or not. There are no strings attached to user code.
Sensor-to-terrain mapping library
Rugged provides the tools to model any type of sensors rigorously/physically, to process all the spacecraft navigation data (position, velocity and attitude), and to take into account Digital Elevation Models (DEM) to represent the surface of the Earth. It is on this last point that Rugged gets its name from; Rugged deals with rugged terrains.
Rugged relies on Orekit for all what concerns transformations between coordinate systems (inertial/terrestrial) and orbital data but what Rugged brings on top of Orekit, is the capacity to deal with the DEM. Orekit could have been used for intersecting a line of sight with the Earth's ellipsoid but it is not its mandate to know what the Earth's surface looks like as it is a space dynamics library. It is in this perspective that we decided to provide a separate package for those users who look for a robust tool for geometric processing.
Who is using it?
-
Rugged is used for image processing of the Sentinel 2 mission at European Space Agency (ESA) and also to calculate topographic shadow masks for Sentinel 2 products for ESA Scientific Exploitation of Operational Missions (SEOM).
-
Rugged has been used to validate Airbus Defence and Space (ADS) geolocation library.
-
Rugged has been used as a research library by the French Space Agency (CNES) for refinement studies for Pleiades.
-
Rugged is used for study purposes inside CS GROUP.
Who is behind it?
Development
Rugged has been in development since 2014 inside CS GROUP and is still used and maintained by its dual teams of space dynamics and image processing experts.
Several major actors of space research and industry are interested into this project.
We do our best to provide you with a quality code:
Open governance
The Rugged project is driven according to an open governance model, involving representatives from different space field actors in a Project Management Committee (PMC).
PMC members
- Aude Espesset (Thales Alenia Space)
- Ferran Gascon (ESA)
- Daniel Greslou (CNES)
- Jonathan Guinet (CS GROUP)
- Mathieu Jung (Airbus Defense and Space)
- Luc Maisonobe (Independent Expert)